旷视detection组的一篇轻量级two-stage目标检测论文, 起的名字很好听, ThunderNet, 所以就特意找出来看一看. 以前接触detection比较少, 就趁这个机会把一些经典的object detection论文找出来读一读, 主要有two-stage的Faster-RCNN和ont-stage的YOLO、SDD, 它们奠定了一些基本的思路和框架, 新发表的论文基本是在此基础上做延伸, 有需要的时候再细看, 下面是一些总结. (全文4000多字, 涉及4篇paper, 27张图, 加载起来可能比较慢.)
问题概述
通用目标检测, 任务是检测出图片中存在物体的边界框坐标, 且需给出对应物体的分类. 直观地想象, 针对这样一个任务, 如果采用end-to-end的形式训练, 需要有一个网络, 它的输入是图片, 输出是可能存在物体的位置以及类别, 这是one-stage模型, 有无数个可能的位置以及很多种类别的可能, 难度是比较大的. 如果采用two-stage模型, 先让一个网络(region proposal network/RPN)负责找出可能存在物体的区域, 它只关心该区域是否存在物体, 以及该区域的大致坐标位置, 而不关系物体的分类具体是什么. 接下来把这些候选区域送进下一个分类网络(detector), 这个网络只需要关心候选框内的物体分类是什么即可, 具有较强烈的”候选区域内一定存在物体”的先验条件. 两部分网络各司其职, 就能有较好的效果, 但是也存在流程繁琐的缺点.
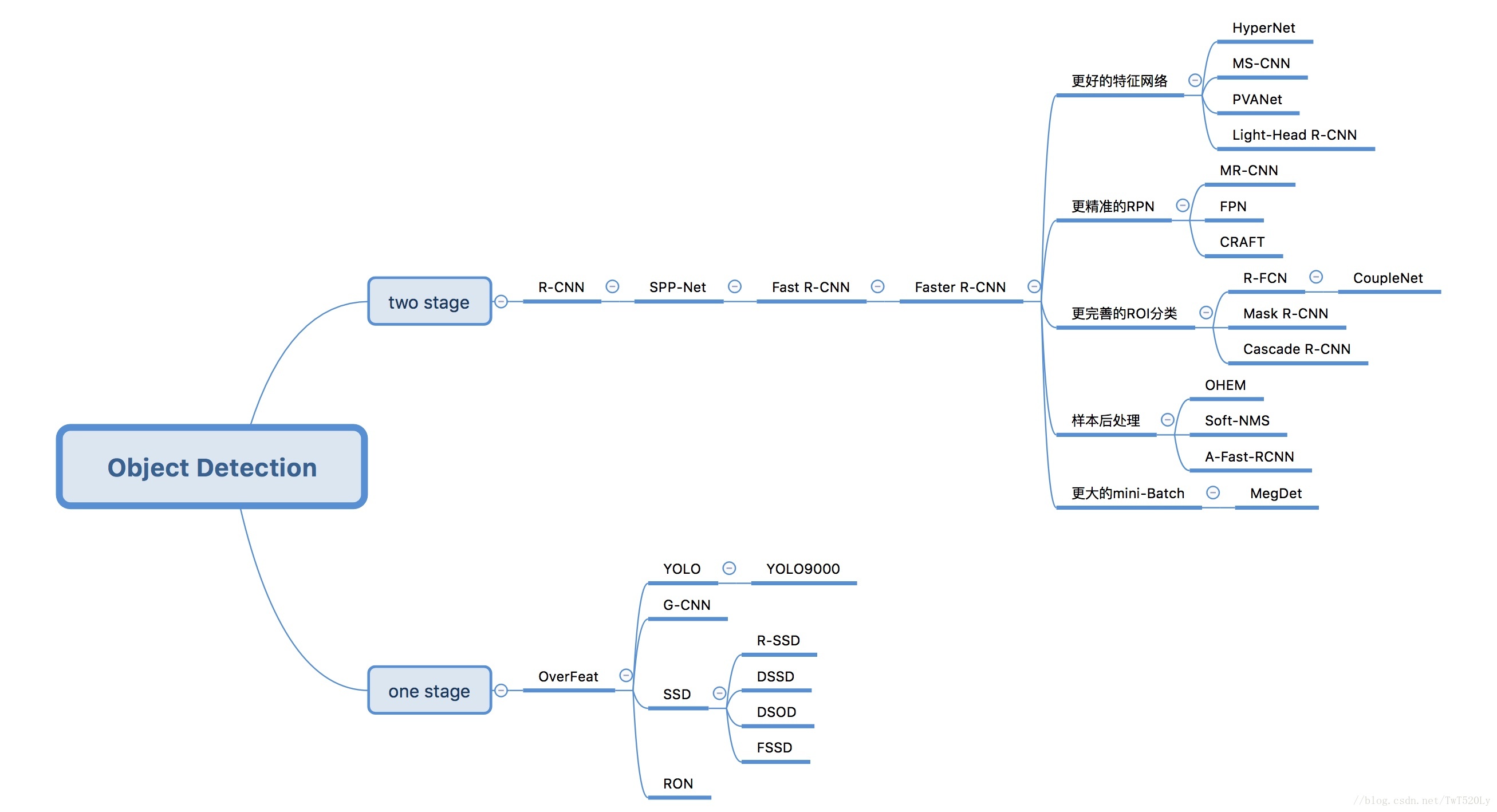
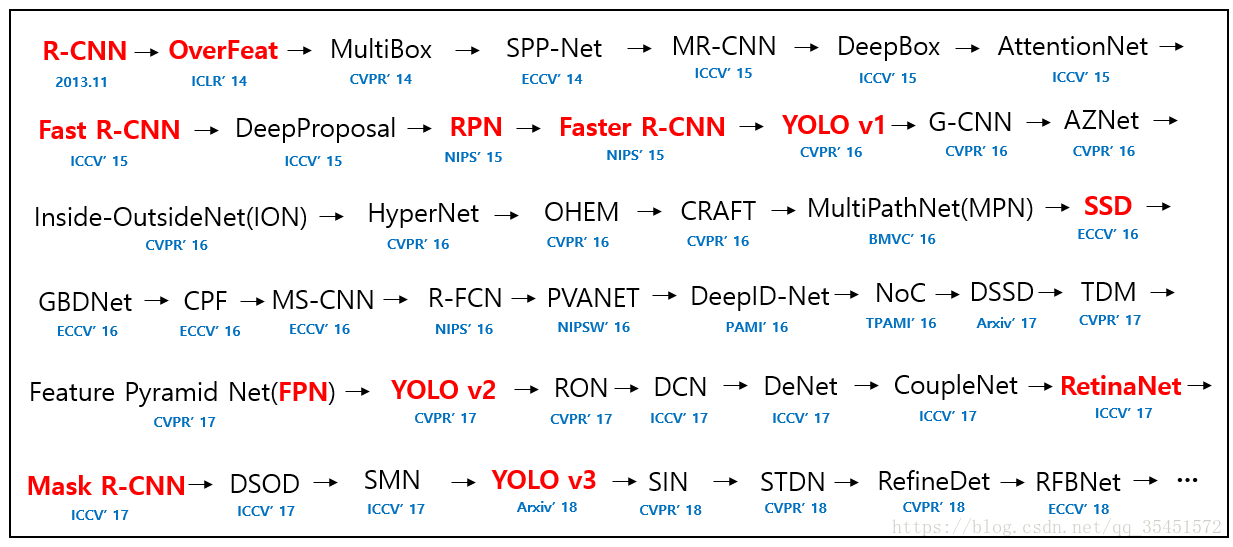 下面分别针对two-stage的经典模型: Faster-RCNN和one-stage的代表模型: YOLO/SDD, 记录一些基本的常识性内容.
下面分别针对two-stage的经典模型: Faster-RCNN和one-stage的代表模型: YOLO/SDD, 记录一些基本的常识性内容.
Faster-RCNN (NIPS 2015)
MSRA出品, 作者列表中有孙剑、何凯明、任少卿等大佬, 这三位也是ResNet的部分作者. 其中任少卿是科大信院与MARS连培的博士, 我作为菜鸡真的是感叹人与人的差距比人与狗的差距还要大.
网络结构
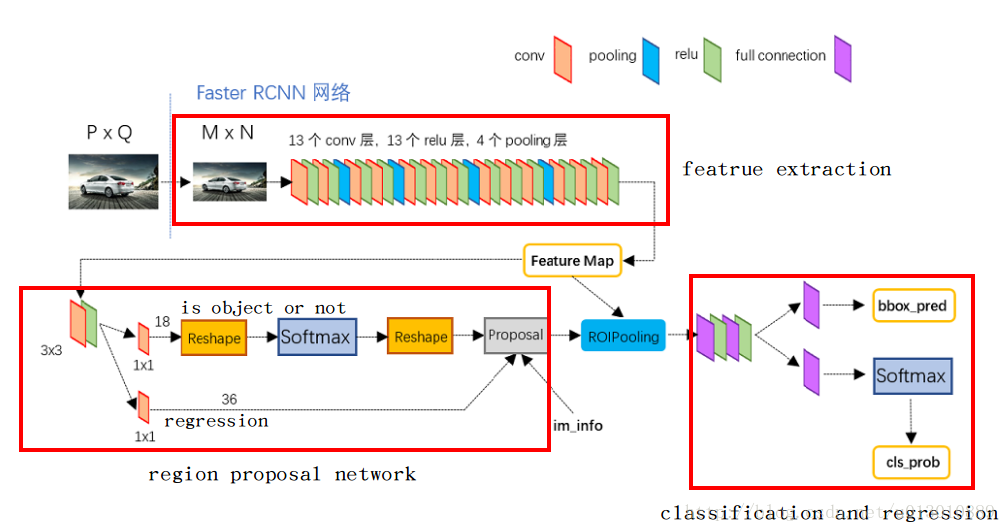 主要有四部分: Backbone, RPN, ROI Pooling, Classifier.
主要有四部分: Backbone, RPN, ROI Pooling, Classifier.
Backbone: 把固定大小为1000x600的input, 降采样为原来的1/16(用了4个2x2的pooling), 输出维度为512x60x40.
RPN:
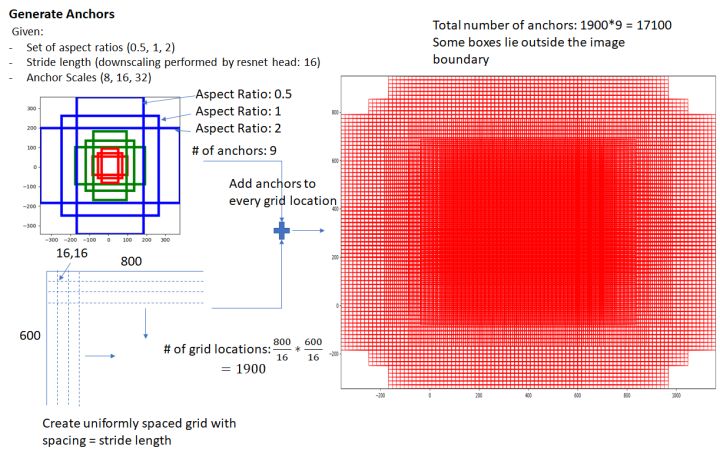
– 对每一个pixel提出9个候选框anchor, 这9种anchor如下图所示(长宽比0.5、1、2, 缩放比8、16、32), 一共有60x40x9=21600个anchor.
 – 有两个分支, 一路做regression, 输出anchor的四个坐标(中心点x、y, 宽高w、h), 维度是36x60x40, 36即是9种anchor的4个坐标点(其实不是绝对坐标, 而是坐标的偏差, 类似于残差的思想, 在后面loss一节会再做详细介绍); 另一路做classification, 输出该anchor是否存在物体(0或1), 维度是18x60x40, 18即是9种anchor被softmax分成0或1的两类.
– 有两个分支, 一路做regression, 输出anchor的四个坐标(中心点x、y, 宽高w、h), 维度是36x60x40, 36即是9种anchor的4个坐标点(其实不是绝对坐标, 而是坐标的偏差, 类似于残差的思想, 在后面loss一节会再做详细介绍); 另一路做classification, 输出该anchor是否存在物体(0或1), 维度是18x60x40, 18即是9种anchor被softmax分成0或1的两类.
– 这些anchor数量太多了, 需要进行剔除. 首先去掉超出feature边界的框, 然后标记与Ground Truth之间IoU超过0.7的框即为正例保留, 标记与Ground Truth之间IoU小于0.3的框为反例保留, 其余框剔除. 然后在剩下的框中, 正例随机取128个, 反例随即取128个进行训练. (不同的是, 在inference时, 如果有anchor越界了, 不会进行剔除, 会对其进行clip, 限定在图像区域内.)
– RPN最后还有一个Proposal层, 细节也比较多. proposal接受经过残差修正后的新anchor(如何修正见下节loss介绍), 再次进行剔除(越界剔除、宽高过小的anchor剔除), 接下来进行非极大值抑制, 旨在去掉重复区域较多的anchors提高效率. 然后按照前面的输出softmax score从大到小对anchors进行排序, 选择前面topN的anchors(即只保留正例anchors). 至此, anchor就是比较干净和较准确的框了, 可以送入下一步进行分类识别.
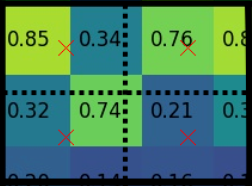
– 非极大值抑制(Non-Maximun Suppression/NMS):
a. 对所有anchor的得分从大到小排序, 如上图[0.98, 0.83, 0.81, 0.75, 0.67].
b. 以当前最大值0.98为参考, 依次判断其它anchor是否与参考框的IoU超过某一阈值(文中取的是0.7), 剔除重复面积过大的框, 如删除[0.83, 0.75], 保留最大值0.98并以后不参与筛选.
c. 找出当前最大值0.81, 重复步骤b, 直到没有框可供筛选.如图最后只留下了每一轮的最大值0.98和0.81.
ROI Pooling: 输入是由RPN筛选出的大约300个anchors坐标(300x4), 以及backbone生成的维度为512x60x40的feature. 前面过程中幸存下来的这些anchors, 宽高比可能不一致, 需要把它们映射成固定大小的feature, 方便后面带有全连接的分类器进行分类. 方法比较粗暴, 即把anchor在feature上所对应的区域, 分割成7x7的块儿, 每个块内取最大值, 即得到300x512x7x7的feature.
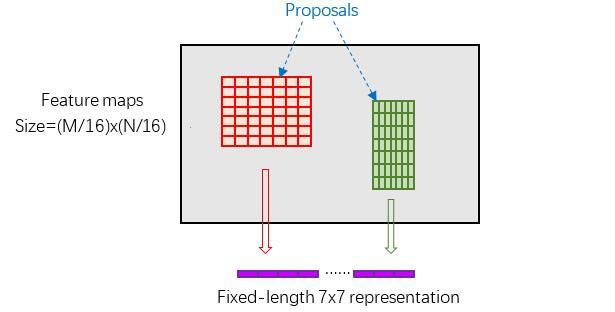
– RoI Pooling可能存在的问题:
一, anchor映射回feature会存在量化误差, 如50/3=16.66, 实际中只能取16; 二, 映射后的feature的候选区域宽度不是7的整数倍时, pooling也会带来量化误差, 对结果产生影响, 如第一步中的16, 16/7=2.28, 实际中只能取2.
因此这里有替代方案–RoIAlign: 一, 保留映射时的浮点数; 二, pooling时, 对虚拟中心点采用双线性插值, 再进行pooling.
Classifier: 输入是300x512x7x7的anchor feature, 输出有两路: 一路是每一个anchor的类别概率, 维度是300x81(有81个类); 另一路是每个anchor的坐标偏移修正法量, 维度是300x(81x4), 对框的位置进行精细修正. 这两个输出即是我们最终想要的”物体类别”和”物体位置”.
损失函数
RPN和Classifier是分开训练的, 因为目的不一样. RPN目的是找出存在物体的框, 只关心是否存在物体以及框的粗修正, 不关心框内是什么物体; Classifier只认为送给它的输入框内一定存在物体, 有一个很强的先验假设, 然后它在此基础上放心地去预测这个物理到底属于哪一类, 同时进行精细框修正.
RPN loss:
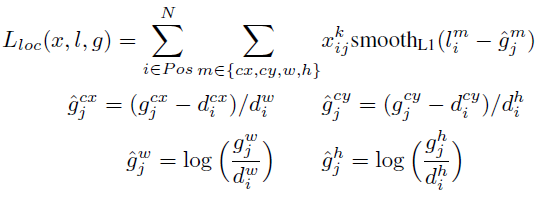
– 一个是对物体是否存在的分类loss, 原文中采用的是log loss, 其实就是cross entropy loss; 一个是对边界框偏移量进行修正的regression loss, 原文中采用的是smooth L1 loss, 俗称huber loss. 由于两部分loss的数量级差了将近10倍, 所以取$\lambda=10$进行量级平衡.
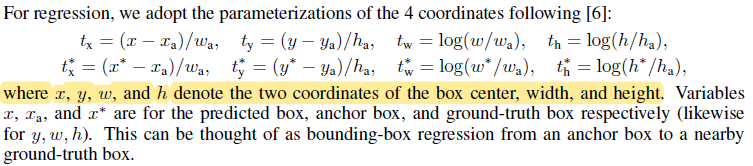
 – 再来看, anchor的四个坐标表示到底是什么, 摘抄原文中的一段如下, 即用$(t_x, t_y, t_w, t_h)$表示偏移量, 它们越小表示box重叠地越好. 回归收敛后, 可使用$(t_x, t_y, t_w, t_h)$转换得到真正的$(x_a, y_a, w_a, h_a)$.
– 再来看, anchor的四个坐标表示到底是什么, 摘抄原文中的一段如下, 即用$(t_x, t_y, t_w, t_h)$表示偏移量, 它们越小表示box重叠地越好. 回归收敛后, 可使用$(t_x, t_y, t_w, t_h)$转换得到真正的$(x_a, y_a, w_a, h_a)$.
 Classfier loss: 基本同上, 一个分类loss, 对应着不同的类别(不同的是, RPN分类只有0和1两类, 而这里有81类); 一个是回归loss, 对应着精细框位置修正.
Classfier loss: 基本同上, 一个分类loss, 对应着不同的类别(不同的是, RPN分类只有0和1两类, 而这里有81类); 一个是回归loss, 对应着精细框位置修正.
训练过程: 一, 导入ImageNet预训练模型, 单独训练RPN; 二, 单独训练Classifier, 它的输入是上一步训练好的RPN提供的proposal; 三, 再次单独训练RPN, 这次会先把Classifier的部分Conv层权重导入到RPN并冻结, 这里就是共享权重的地方, 节省了计算时间; 四, 单独训练Classifier, 这里在上一步中共享给了RPN的权重会被冻结, 输入是上一步训练好的RPN提供的proposal. 本质就是一种迭代循环, Classifier不断地共享它的部分权重给RPN, 二者轮流fine tune, 只不过文中只循环了两次, 作者说两次循环就够了, 再往下循环下去对性能也没有太大提升.
至此two-stage的Faster RCNN便介绍完了, 可以看到流程比较复杂, 而且NIPS原文有一些细节也没讲清楚, 这里参考了一些资料.
Faster RCNN原文: Faster RCNN
知乎专栏: 一文读懂Faster RCNN
一篇博客: Faster RCNN 学习笔记
YOLO (CVPR 2016)
比Faster RCNN稍微晚了一点, 作者之一是Ross Girshick, 这个人同时也是Faster RCNN、Fast RCNN和RCNN的作者, 发表RCNN时在UC Berkeley, 发表Fast RCNN和Faster RCNN时去了微软, 发表现在这篇YOLO时是在Facebook AI, 简直给跪了.
网络结构
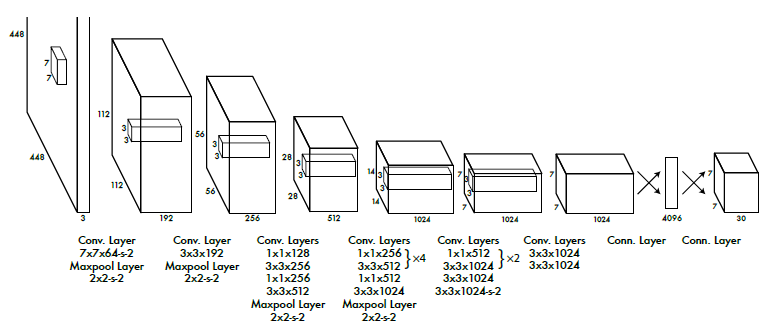 网络结构平平无奇, 就是个类似于VGG一卷到底的结构. 主打轻量级end-to-end的模式, 没有复杂的RPN候选框机制, 文章开头就先把two-stage方法的复杂且低效吐槽了一遍, 强调该文的方法只需
网络结构平平无奇, 就是个类似于VGG一卷到底的结构. 主打轻量级end-to-end的模式, 没有复杂的RPN候选框机制, 文章开头就先把two-stage方法的复杂且低效吐槽了一遍, 强调该文的方法只需you only look once(YOLO), 有快速、低背景错误率和实际场景泛化能力强的优点.
下面来看该方法的特殊思路. 如果直接让模型既输出物体边界框, 又输出物体类别, 这是一个无法收敛的任务, 无法正确指明优化的方向, 所以得做一些特殊的处理.
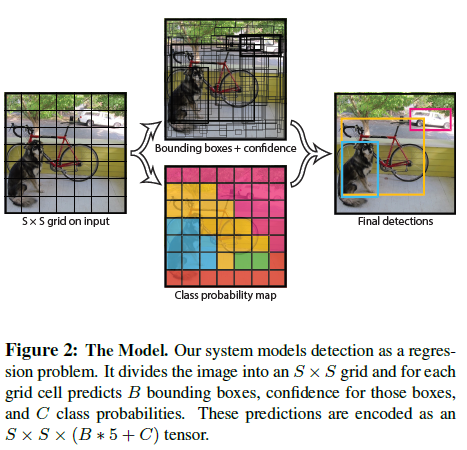 首先, 强行把输入图片划分成SxS的网格(文中取7x7). 接下来有一个分支, 负责预测每个网格属于哪个类别(对应上图class probability map), 这里是不需要预测位置信息的, 输出维度是SxSxC, C是类别的个数; 另外一个分支, 在每个网格上提出B个anchor(文中取B=2), 预测的是这些anchor区域是不是有一个物体的可能性, 只考虑是不是物体, 不考虑物体的类别是什么, 这与RPN只负责检测是否存在物体有点类似. 另外, 还预测这B个anchor的4个坐标点的位置, 所以输出维度是SxSx(B$\ast$5). 最后这两个分支合起来, 输出维度就是SxSx(B$\ast$5+C). 虽然是这么分析, 但是具体到网络中, 直接把最后一维4096的向量reshape成SxSx(B$\ast$5+C), 重点放在了loss上.
首先, 强行把输入图片划分成SxS的网格(文中取7x7). 接下来有一个分支, 负责预测每个网格属于哪个类别(对应上图class probability map), 这里是不需要预测位置信息的, 输出维度是SxSxC, C是类别的个数; 另外一个分支, 在每个网格上提出B个anchor(文中取B=2), 预测的是这些anchor区域是不是有一个物体的可能性, 只考虑是不是物体, 不考虑物体的类别是什么, 这与RPN只负责检测是否存在物体有点类似. 另外, 还预测这B个anchor的4个坐标点的位置, 所以输出维度是SxSx(B$\ast$5). 最后这两个分支合起来, 输出维度就是SxSx(B$\ast$5+C). 虽然是这么分析, 但是具体到网络中, 直接把最后一维4096的向量reshape成SxSx(B$\ast$5+C), 重点放在了loss上.
损失函数
由上面的分析知, class probability那一路负责预测类别, 它有每个网格内必定存在物体的先验, 所以预测的是$P(Class_i\mid Object)$; 另一路bounding boxes + confidence预测是否存在物体和位置, 可表示为$P(Object)\times IoU_{pred}^{truth}$. 最后将二者合并, 预测的就是我们的目的: 类别和位置.
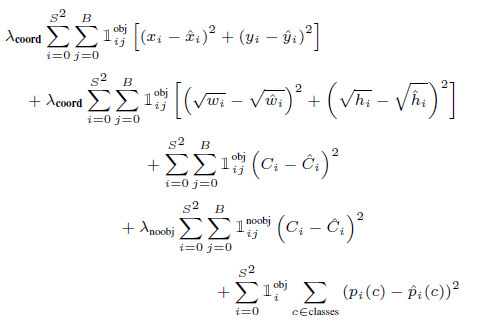
 既然是两个任务, 损失函数也要兼顾两部分任务. 一, 对于四个位置点(x, y, w, h)的预测, 采用了MSE loss, 特殊地, 大框位置偏一点对总体IoU影响不大, 但是小框位置偏一点对最后IoU 影响很大, 所以要提高小框影响的权重, 也是就是降低大框的权重, 所以loss里用的是$\sqrt w, \sqrt h$. 二, 对于anchor confidence的预测, 它们的重要性不如位置点的预测,位置点先预测准了, confidence自然就上去了, 所以做权重调整, 文中给的是$\lambda_{coord}=5, \lambda_{haveObject}=1, \lambda_{noObject}=0.5$. 三, 对于网格类别的预测, 文中没有采用one-hot编码, 而是每一类都预测一个浮点型概率, 最后采用MSE loss. 如下图, 第一二行对应位置回归, 三四行对应是否存在物体的confidence回归, 第五行对应网格点物体类别回归.
既然是两个任务, 损失函数也要兼顾两部分任务. 一, 对于四个位置点(x, y, w, h)的预测, 采用了MSE loss, 特殊地, 大框位置偏一点对总体IoU影响不大, 但是小框位置偏一点对最后IoU 影响很大, 所以要提高小框影响的权重, 也是就是降低大框的权重, 所以loss里用的是$\sqrt w, \sqrt h$. 二, 对于anchor confidence的预测, 它们的重要性不如位置点的预测,位置点先预测准了, confidence自然就上去了, 所以做权重调整, 文中给的是$\lambda_{coord}=5, \lambda_{haveObject}=1, \lambda_{noObject}=0.5$. 三, 对于网格类别的预测, 文中没有采用one-hot编码, 而是每一类都预测一个浮点型概率, 最后采用MSE loss. 如下图, 第一二行对应位置回归, 三四行对应是否存在物体的confidence回归, 第五行对应网格点物体类别回归.
 最后, 对所有修正后的anchor进行非最大值抑制, 这个在Faster RCNN中也有介绍, 不再赘述.
最后, 对所有修正后的anchor进行非最大值抑制, 这个在Faster RCNN中也有介绍, 不再赘述.
模型效果
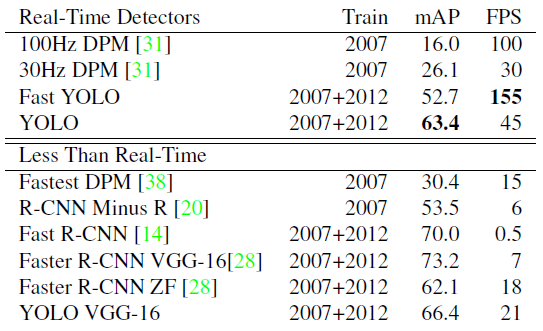
虽然效果不是最佳的, 但是运行速度FPS显著高于其它, 达到了效果和性能的综合最佳. 同时, 与Fast RCNN相比, 虽然它的位置出错率占比更高, 但是它的背景出错率占比更低, 也就是它的False Positive更低, 不容易把背景认成Object.

YOLO原文: YOLO
SDD (ECCV 2016)
稍晚于YOLO, 因此也借鉴了一些YOLO one-stage的思想, 感觉是出于技术的后发优势, 达到了性能优于Faster RCNN且速度优于YOLO的效果. 文章做的工作很好, 但是不得不吐槽一下文章的写作真是一言难尽, 很多细节没有表述清楚, 还有很多冗余的废话, 用了很多长句. 看了一下第一作者, 是个中国学生写的, 也就不觉得奇怪了.
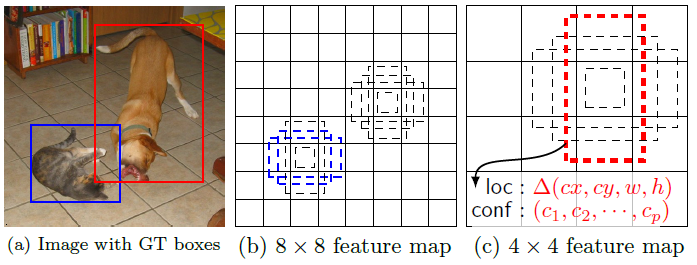
示例一:
we evaluate a small set of default boxes of different aspect ratios at each location in several feature maps with different scales.
示例二:By combining predictions for all default boxes with different scales and aspect ratios from all locations of many feature maps,
不禁让我想起自己的论文, 其实也犯了很多这样的错误, 滥用长句, 一个句子里”of、for、in、with、from、by”这些介词全用上了, 其实完全拆开写成短句更清晰. 还有就是用了很多主动语态, 公式里的符号没有紧接着完全点明含义. 在英文写作这块, 很多非母语作者也表述得很地道, 读起来完全没有理解障碍, 写的时候应该也是花了一番心思的, 所以以后看文章要多留心native的表达方式.
网络结构
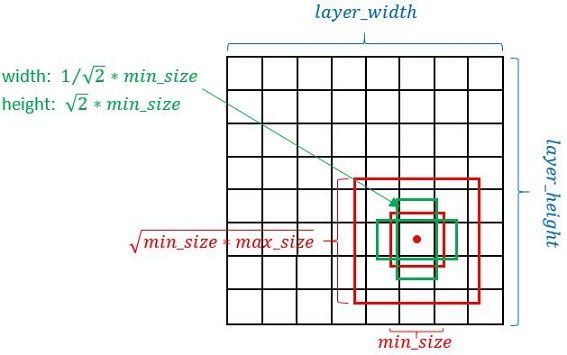
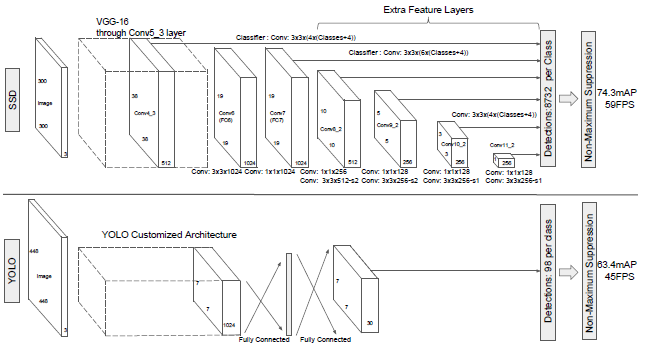 跟YOLO相比, 无非就是在不同level的feature上都提出anchor, 以此来捕捉不同尺度大小的物体. 具体的来说, 浅层感受域小的feature用来检测小目标, 深层感受域大的feature用来检测大目标. 同时, 不同level的feature由于大小不同, anchor的大小也根据feature的大小来相应成比例变化.
跟YOLO相比, 无非就是在不同level的feature上都提出anchor, 以此来捕捉不同尺度大小的物体. 具体的来说, 浅层感受域小的feature用来检测小目标, 深层感受域大的feature用来检测大目标. 同时, 不同level的feature由于大小不同, anchor的大小也根据feature的大小来相应成比例变化.
损失函数
跟YOLO有点类似, 分为类别预测loss和位置回归loss, 其中类别预测loss用的是softmax loss, 位置回归loss用的是smooth L1 loss.


训练策略
– Matching strategy: feature上的每个pixel都有好几个anchor, 所以anchor总数很多, 需要进行筛选, 与Ground Truth的IoU超过阈值0.5, 才会认为是正例.
– Hard negative mining: 反例往往多于正例, 这会导致在训练时loss被反例所支配, 所以要进行比例调整, 按照confidence score排序, 挑选前面的部分正例, 使得正例:反例=1:3.
– Data augmentation: 三种方式, 一种是输入原图, 另一种是在原图上随机取patch, 最后一种是在Ground Truth周围随机取patch(IoU=0.1, 0.3, 0.5, 0.7, 0.9), 这种patch在后面利用率很高. 后面还有0.5概率随机flip.
模型效果及评价
 mAP比Faster RCNN要好, FPS还比YOLO要高. 总体感觉, 整体思想其实跟YOLO没什么本质区别, 只是增加了更多的数据增广手段, 如多level的feature、随机取patch, 提升了不同尺度下物体的效果. YOLO中对anchor未做长宽比限制, 也就是说每个anchor的形状都是随机无假设的, 而SSD做了不同宽高比的anchor假设, 这里就存在一个先验假设, 假设了物体的不同尺寸, 这个假设对结果有一定的提升. 说白了, 就是trick比较多, 对结果提升有好处, 坏处是很多超参(如宽高比、feature的选择)的调整是手动的, 依据经验的.
mAP比Faster RCNN要好, FPS还比YOLO要高. 总体感觉, 整体思想其实跟YOLO没什么本质区别, 只是增加了更多的数据增广手段, 如多level的feature、随机取patch, 提升了不同尺度下物体的效果. YOLO中对anchor未做长宽比限制, 也就是说每个anchor的形状都是随机无假设的, 而SSD做了不同宽高比的anchor假设, 这里就存在一个先验假设, 假设了物体的不同尺寸, 这个假设对结果有一定的提升. 说白了, 就是trick比较多, 对结果提升有好处, 坏处是很多超参(如宽高比、feature的选择)的调整是手动的, 依据经验的.
SSD原文: SSD
ThunderNet (ICCV 2019)
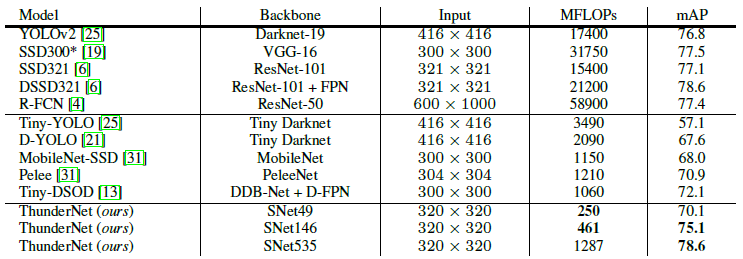
旷视做了很多模型轻量化的探索, 比如著名的shuffleNet系列, 主要是针对将来部署在端上(手机或摄像头)的实时模型需求. 这篇ThunderNet就是在这种业务背景下催生出来的, 虽然是two-stage, 但是能够在ARM平台上real-time运行.
网络结构
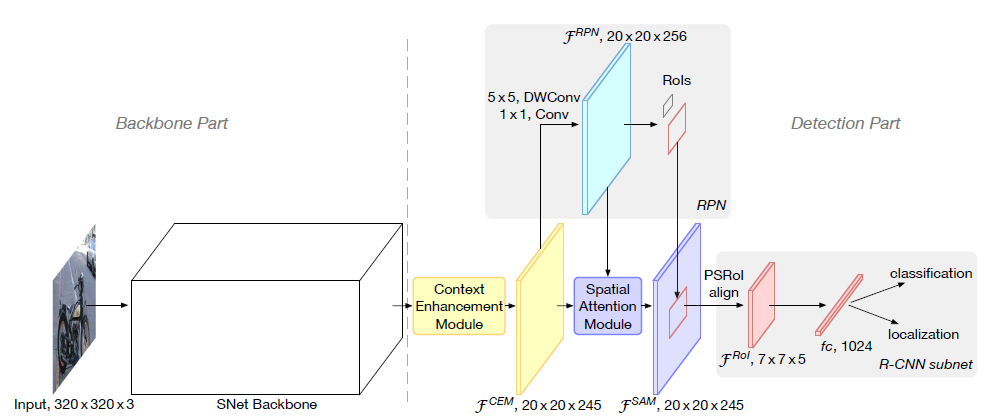
Backbone Part: 320x320固定大小的输入. 传统detection模型的backbone都是从一个classifier网络(例如VGG)迁移而来, 但文中指出classification和detection任务的性质不同, 具体来说, classification需要大的感受域和high level的feature来进行分类, 不关心local的纹理细节, 而detection需要low-level的纹理细节(或者说空间信息)来进行定位, 同时又要求大的感受域使得看到物体的范围更大. 因此detection所用的网络应该是又浅又大的(层数少且感受域大), 文中的backbone采用了ShuffleNet V2, 但是为了增加low-level的重要性, 将其中3x3的Conv换成了5x5的Conv, 还在low-level feature上增加了更多的channel数. 以上便是被称为SNet的Backbone.
Detection Part:
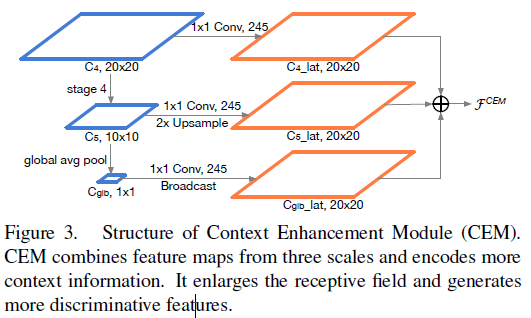
– Context Enhancement Module: backbone的输出感受域还是不够大, 在这里, 为了进一步扩大感受域, 采用了金字塔型的多级feature融合方法, 即在backbone的末级用1x1的Conv和上采样得到local context information和global context information.
 – RPN & subnet: RPN与Faster RCNN中的结构差不多, subnet仅仅是一个卷积层和一个全连接层.
– RPN & subnet: RPN与Faster RCNN中的结构差不多, subnet仅仅是一个卷积层和一个全连接层.
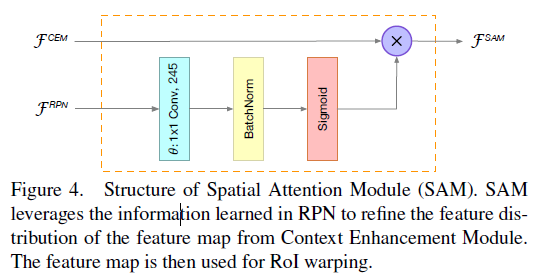
– Spatial Attention Module: 这个模块是一个与RPN并行的分支旁路, 它的目的是利用RPN所学得的前景和背景的区别, 增强网络对前景的关注, 降低对背景的关注度. 同时, 它也是一种short cut, 能增强梯度的流动.
损失函数
文中并未提及loss函数, 猜测和同样是two-stage的Faster RCNN的loss差不多.
模型效果
模型评价
因为是旷视系的文章, 所以文章倾向于使用或引用孙剑老师门下的文章结构(如GCN、shuffleNet、Lighthead r-cnn等). 同时, 依靠一些对网络模型的理解和经验, 压缩了一些channel数减小计算压力, 增大了一些kernel大小增大了感受域, 设计了一些模块提取local和global的空间信息, 并调整了特征图的注意力分布, 在容量上考虑了backbone和detector的平衡, 各种考量综合起来达到了想要的目的. 虽然可能在模型创新上不是break through, 但是具有很强的实用价值, 可以实时运行在ARM上. 所以要多看文章, 理解神经网络模型的意义, 各个feature对应着什么, 各种任务需要的是什么, 才能合理”搭积木”.
ThunderNet原文: ThunderNet