在detection任务中,需要对候选框的坐标位置进行回归。常用的loss有L1、Smooth L1、L2,但它们的参数都是未归一化的,容易受框的尺寸影响,后来又有IoU这种归一化过的尺寸无关loss,但它也有优化缓慢、未重叠框无法优化等缺点,于是又有人在IoU的基础上进行各种改进,本文将会介绍这些改进版的IoU loss。
L1/L2 loss
对框最直接的表达,就是描述其中心点坐标以及长宽,$\lbrace x_{center},y_{center},w,h \rbrace$,或者是四个点的坐标,$\lbrace x_{top-left},y_{top-left},x_{bottom-right},y_{bottom-right}\rbrace$。对于anchor-based方法,可以用坐标的偏移量offset来回归,即学习其残差,如$\lbrace x_{center-offset},y_{center-offset},w_{offset},h_{offset} \rbrace$,$\lbrace x_{top-left-offset},y_{top-left-offset},x_{bottom-right-offset},y_{bottom-right-offset}\rbrace$。
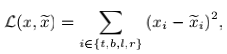 直接用L1/L2距离对它们进行回归,思路很直接,但是这种方式存在两个缺点:一,它把一个整体的框看成四个独立的点,优化过程中没有考虑整体性,容易出现某一两个点离真实点很近,但另外两个点却离真实点偏离很远,此时依然有较小的loss;二,它的参数都没有归一化,这样“在大框上小的误差”和“小框上大的误差”会被等同看待,但其实后者对整体精度的影响要大得多,由此小框上的localization会很差。
直接用L1/L2距离对它们进行回归,思路很直接,但是这种方式存在两个缺点:一,它把一个整体的框看成四个独立的点,优化过程中没有考虑整体性,容易出现某一两个点离真实点很近,但另外两个点却离真实点偏离很远,此时依然有较小的loss;二,它的参数都没有归一化,这样“在大框上小的误差”和“小框上大的误差”会被等同看待,但其实后者对整体精度的影响要大得多,由此小框上的localization会很差。
IoU loss
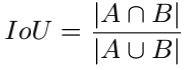
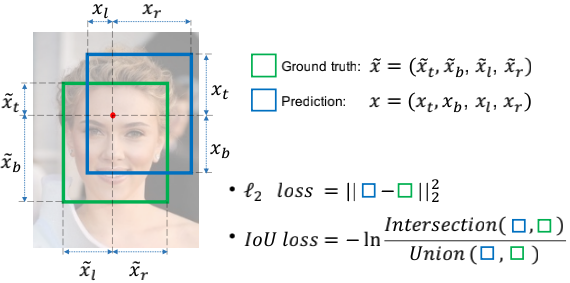 为了解决L1/L2 loss的上述缺点,IoU loss被提出,它的思路很简单,直接面向目标优化,追求预测框与真实框的最大重合。框被当成一个整体看待,同时分数也是一个无量纲的比值,也就避免了之前的缺点。
为了解决L1/L2 loss的上述缺点,IoU loss被提出,它的思路很简单,直接面向目标优化,追求预测框与真实框的最大重合。框被当成一个整体看待,同时分数也是一个无量纲的比值,也就避免了之前的缺点。
但它也不是完美的,设想一下极端的情况,假如一开始预测框与真实框就离得太远,没有重叠部分,那该怎么优化?此时一开始loss就是0,且无法指示优化的方向,完全无法优化下去。当然这只是理论上会发生,实际上候选框会经过手动排序和选择,尽量避免这种情况的发生。
GIoU loss(CVPR 2019)
为了专门解决IoU loss在框未重叠时的优化问题,引入了泛化的Generalized IoU(GIoU)。设想有框A和B,先找出一个能同时覆盖A和B的最小凸多边形C,随后定义:
 关键就在于上式中的最后一项,分子代表C中排除掉A和B还剩下的区域。考虑两种极端情况,当A和B没有交集时,$IoU=0$,$GIoU=-\frac{C-A\cup B}{C}$,下限$GIoU=-1$不为0,依然能指示优化的方向,此时GIoU能减少C中除A和B之外的区域大小,迫使A和B整体相互靠近,达到相互重叠的目的;当A和B完全重合时(此时A=B=C),$IoU=1$,上限$GIoU=1$,GIoU已经退化成了IoU。
关键就在于上式中的最后一项,分子代表C中排除掉A和B还剩下的区域。考虑两种极端情况,当A和B没有交集时,$IoU=0$,$GIoU=-\frac{C-A\cup B}{C}$,下限$GIoU=-1$不为0,依然能指示优化的方向,此时GIoU能减少C中除A和B之外的区域大小,迫使A和B整体相互靠近,达到相互重叠的目的;当A和B完全重合时(此时A=B=C),$IoU=1$,上限$GIoU=1$,GIoU已经退化成了IoU。
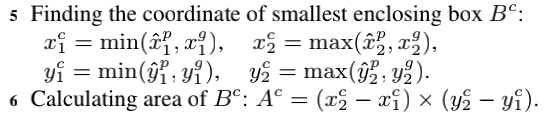
具体到细节,如何找到A和B的最小凸多边形C?看起来挺麻烦,但好在在detection任务中,候选框都是矩形的,A和B都是矩形,那么C有理由也是矩形,只需要计算出同时覆盖住A和B的矩形即可。类似于计算交集的过程,只不过求min和求max反了过来:
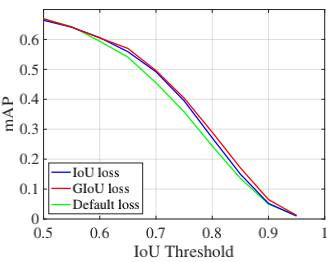
 直观地看一眼GIoU在Faster R-CNN上的结果,效果比IoU loss和L1-smooth loss都要好,尤其在高阈值区间这种差距更明显,说明使用GIoU会使得localization更准。
直观地看一眼GIoU在Faster R-CNN上的结果,效果比IoU loss和L1-smooth loss都要好,尤其在高阈值区间这种差距更明显,说明使用GIoU会使得localization更准。
原文地址:Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression
DIoU loss(AAAI 2020)
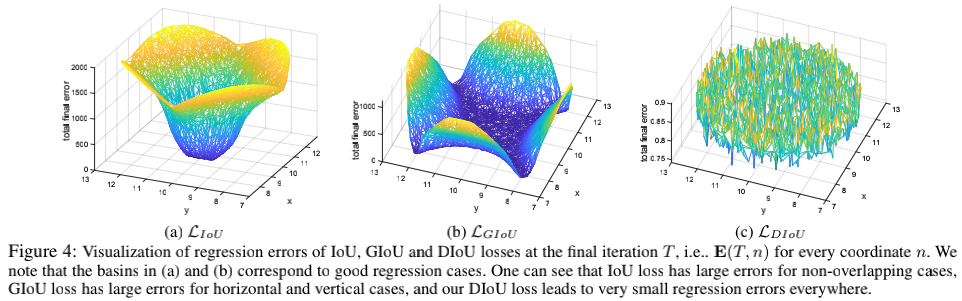
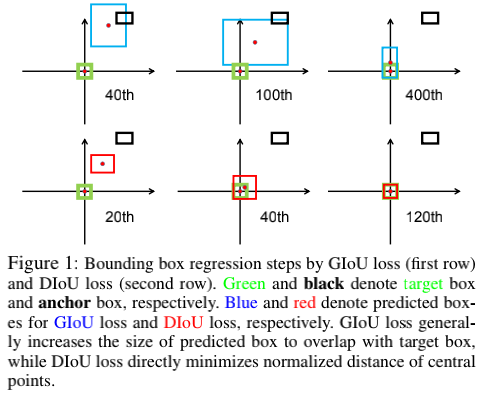 GIoU有缺点吗?有。当A和B不重叠时,它的确能解决继续优化的问题,但这个过程太慢了,需要先迫使AB相交,再转化为IoU优化,这需要较多的迭代次数(如上图);另一方面,当框很狭长时,GIoU的补偿项$\frac{C-A\cup B}{C}$很小,此时已经退化成IoU了,而GIoU和IoU对狭长框的回归效果都不好(如下图)。
GIoU有缺点吗?有。当A和B不重叠时,它的确能解决继续优化的问题,但这个过程太慢了,需要先迫使AB相交,再转化为IoU优化,这需要较多的迭代次数(如上图);另一方面,当框很狭长时,GIoU的补偿项$\frac{C-A\cup B}{C}$很小,此时已经退化成IoU了,而GIoU和IoU对狭长框的回归效果都不好(如下图)。
 为了解决这两个问题,提出了Distance-IoU(DIoU)Loss,它抛弃了GIoU中最小覆盖域C的使用,直接把IoU loss和L2 loss结合起来,既具有IoU loss整体性和尺寸无关性的优点,又有AB不相交时可继续优化的特点。虽然引入了L2距离,但经过了归一化,也变得跟尺寸无关。
为了解决这两个问题,提出了Distance-IoU(DIoU)Loss,它抛弃了GIoU中最小覆盖域C的使用,直接把IoU loss和L2 loss结合起来,既具有IoU loss整体性和尺寸无关性的优点,又有AB不相交时可继续优化的特点。虽然引入了L2距离,但经过了归一化,也变得跟尺寸无关。

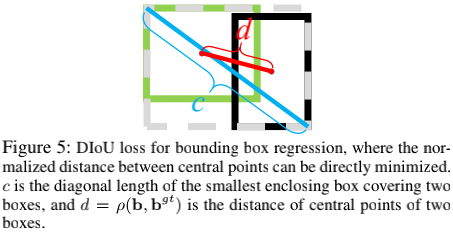 式中,最后一项以预测框和真实框的中心点距离为参考,并除以二者的对角距离,限定范围0-1。由于这一项的存在,框坐标回归的过程中是非常快的,即便是AB不相交,以及狭长框等hard case。
式中,最后一项以预测框和真实框的中心点距离为参考,并除以二者的对角距离,限定范围0-1。由于这一项的存在,框坐标回归的过程中是非常快的,即便是AB不相交,以及狭长框等hard case。
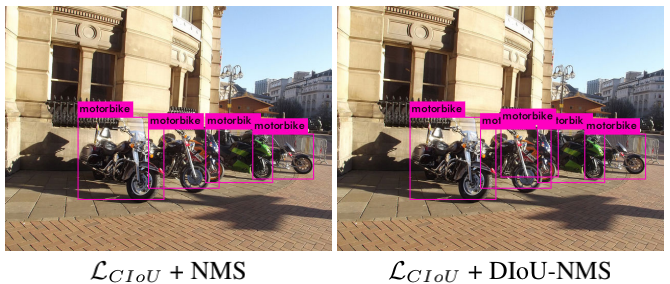
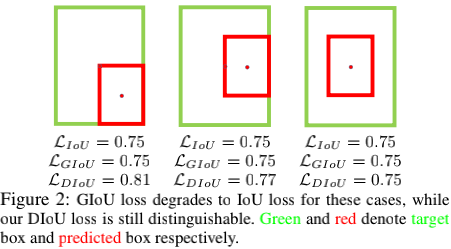 DIoU的另一个优点,在于即使A完全覆盖B时,也不至于退化成IoU(此时GIoU已退化成IoU),依然能凭借L2距离项继续指示优化的方向(如上图)。基于这个特性,可以用DIoU代替传统的IoU来做框的非极大值抑制,能够更多地保留住有用的框(如下图),这被称为DIoU-NMS。
DIoU的另一个优点,在于即使A完全覆盖B时,也不至于退化成IoU(此时GIoU已退化成IoU),依然能凭借L2距离项继续指示优化的方向(如上图)。基于这个特性,可以用DIoU代替传统的IoU来做框的非极大值抑制,能够更多地保留住有用的框(如下图),这被称为DIoU-NMS。
原文地址:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
CIoU loss(AAAI 2020)
CIoU其实和DIoU出自同一篇文章,这里为了清晰起见,把二者分开讲解。DIoU解决了IoU类loss训练缓慢的问题,但在精度上没有大幅度的提升。能否继续改进,让框的回归更快,同时更准?CIoU的目标便是如此。
文中总结了框回归的三要素:重叠区域大小、中心点距离、长宽比。IoU/GIoU loss只考虑了第一点,L1/L2 loss只考虑了第二点,DIoU loss同时考虑了第一和第二点。如果设计一种loss把上述三点考虑全了,应该就能达到又快又准的效果,这便是Complete IoU(CIoU)loss的思想。
 CIoU形式如上,其实就是在DIoU的基础上,加了一项$\upsilon$,该项考虑的是长宽比,形式如下:
CIoU形式如上,其实就是在DIoU的基础上,加了一项$\upsilon$,该项考虑的是长宽比,形式如下:
 然而,三要素之间存在优先级,第一点(重叠面积)要比第三点(长宽比)重要,尤其是在初始阶段AB尚未相交时,此时追求长宽比并没有那么重要,因此需要适当降低它的权重。所以长宽比项带了系数$\alpha$,它参考IoU的大小做了一次缩放:
然而,三要素之间存在优先级,第一点(重叠面积)要比第三点(长宽比)重要,尤其是在初始阶段AB尚未相交时,此时追求长宽比并没有那么重要,因此需要适当降低它的权重。所以长宽比项带了系数$\alpha$,它参考IoU的大小做了一次缩放:
 在效果上,文中把上述所有的IoU loss都做了对比实验,结果如下。DIoU和CIoU对性能都有较明显的提升,CIoU配合DIoU-NMS的效果则更好。至于说为什么没有DIoU配合DIoU-NMS的组合,可能是因为效果不好?原因不明。另外,也没有CIoU-NMS这个东西,可能因为在挑选框的时候,长宽比根本不重要,只要重叠面积和中心距离足够近,这样的框就已经足够好了,但是作者是不是也做一下对比实验比较好?可能最终效果不好所以没放上来。
在效果上,文中把上述所有的IoU loss都做了对比实验,结果如下。DIoU和CIoU对性能都有较明显的提升,CIoU配合DIoU-NMS的效果则更好。至于说为什么没有DIoU配合DIoU-NMS的组合,可能是因为效果不好?原因不明。另外,也没有CIoU-NMS这个东西,可能因为在挑选框的时候,长宽比根本不重要,只要重叠面积和中心距离足够近,这样的框就已经足够好了,但是作者是不是也做一下对比实验比较好?可能最终效果不好所以没放上来。
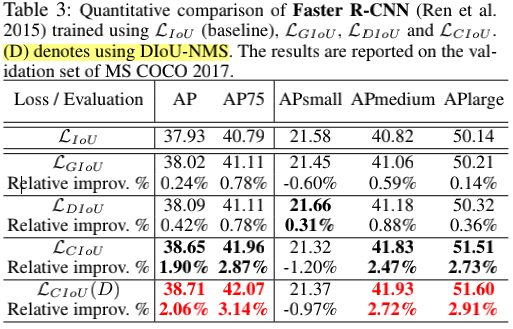 上图中结果唯一反常的是,CIoU在小目标上的精度反而变差了,这也可以理解。因为小目标根本就不在乎长宽比了,在乎的是框的重叠和中心点的距离,此时过多地考虑了长宽比,反而会弱化另两个因素的影响。
上图中结果唯一反常的是,CIoU在小目标上的精度反而变差了,这也可以理解。因为小目标根本就不在乎长宽比了,在乎的是框的重叠和中心点的距离,此时过多地考虑了长宽比,反而会弱化另两个因素的影响。
原文地址:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression